Kutatóknak-konstruktőröknek, fejlesztőknek, és a téma iránt érdeklődőknek!
Az intelligens gépjármű közúti közlekedésének a problémái!
Érdeklődve figyelem az intelligens gépjárművekkel kapcsolatos híreket. Nagy a verseny ezen a téren, és e-közben, megfeledkeznek az út és a jármű közötti kapcsolat fontosságáról. A probléma ugyan úgy fennáll, mint a manuális vezetésnél. Ugyan azokkal a veszélyhelyzetekkel, váratlan veszélyhelyzetekkel, akadályozó tényezőkkel, közlekedési rendszabályokkal kell megküzdenie az automatikus rendszereknek, mint a manuális vezetéskor.
Ugyan azon a fékezési elven működő fékekkel, fékrendszerekkel, a súrlódási együtthatók hatásaival teszi. A fékezés folyamata: “észlelés, döntés, cselekvés” FÉKKÉSEDELMI IDŐ”! is marad! Ez az amit nem lehet ki küszöbölni autonóm vezetéssel sem! Ez elegendő arra, hogy váratlan veszélyhelyzetben fékezéskor a jármű váratlanul, akaratunktól függetlenül megváltoztatja a haladási irányát. Milyen reakció idővel lehet számolni? Már tesztüzemben közlekednek önvezető járművek, de reakció időt még nem mértek! Ha mértek, de nem tették közre, azért kifogásolom, mert biztonságot így nem lehet tervezni, főleg nem a sebességet!
- Meg kell küzdeni az út forgalmi helyzetével, viszonyaival, különös tekintettel az úthibákra, a hosszanti úthibákkal, döntött úttest, különösen a kanyarban, előzéskor az oldaltávolság tartásával, váratlan veszélyhelyzetekkel. (a váratlan veszélyhelyzeteket nem lehet kiküszöbölni, kizárni!)
- Megkülönböztető jelzéssel közlekedő járművekkel. Manuális vezetéskor, hang és fényjelzés használatakor, a hallásunk és látásunk segít az észlelésben, döntéseinkben, de mi a helyzet az autonóm vezetésnél?
- Jármű szerelvények esetében mi a helyzet?
- váratlan veszélyhelyzeteknek nem ismerjük a helyét, idejét, okát sem előre. Vannak jelzőőrök, rendőri karjelzések, hang és fényjelzések, amire a vezetőknek reagálniuk kell, miként lesz ez az önvezető autók esetében?
- váratlan haladási irányváltozás bekövetkezhet az önvezető jármű esetében, de másik közlekedő járművel is. Két eltérő eset, másként reagálva az esetekre! És nincs vége a váratlan veszélyhelyzeteknek, de mindegyikre kell jó megoldás!
- a látási viszonyok, milyen befolyással van az önvezető járművekre? Köd, füst, szakadó eső, az érzékelőkre milyen hatással van? De vegyék figyelembe a velük azonos időben és helyen közlekedőket is, hogy azok is észlelik-e az önvezető járművet? Az önvezető jármű sebességére gondolok! Küzdeni kell még az ilyen közlekedésbiztonsági problémákkal.
A közlekedésnek értelme, célja van, hogy a kívánt célig, időben , sértetlenül, a szabályok és sebességhatárok betartásával érkezzünk meg.
Az időben érkezés problémája: (forgalmi viszonyok, útviszonyok, különösen a hosszanti úthibákra, az időjárás változásra, útjavításokra, vasúti átjárókra, sorompókra, balesetekre, és minden másra, ami a menetidő növekedéshez vezet.) És akkor az ismert képlet: sebesség-út- idő (v=s/t)! Mi a megoldás? A megoldás az automatikus rendszer kikapcsolása, és a vezető átveszi az irányítást, majd növeli a sebességet! Csak így érhet időben az úti céljához! Az útviszony szerinti vezetésnél a nyomvályús út az, ahol a legtöbb menetidő veszteséget szenvedjük el. Hosszan, kilométereken át tart, előre nem lehet betervezni sem. Ezért kockáztatunk, van akinek sikerül, van akinek nem. Ezekből lesznek a súlyos balesetek! A megkülönböztető jelzéssel közlekedő járművek ezért fokozott veszélyben közlekednek. A szakemberek hallgatnak, nincs mondani valójuk! Ezért mondom el én. A veszélyes helyzetek megoldása tehát, a vezetőkre hárul! Nemhogy csökkenne a balesetveszély, és növekedne a közlekedésbiztonság, ez bizony romlik.
Az automatikus vezérlő rendszer működik a légi közlekedésben, a zárt pályás közlekedésnél (metró), Vízi közlekedésnél, de a közúti közlekedés az egészen más! Egy intelligens járműnek sok akadályozó tényezővel kell megküzdenie az útja során. Elindulunk “időben” a kijelölt úti célunk felé, a szabályok, sebességhatárok, út és forgalmi viszonyok, követési távolság, féktávolság betartásával. Az időben érkezés problémás, így nem lehet az életünket megszervezni! Napi teendőink során, hány feladatot kell időre, helyváltoztatással megoldani? Mindenki a saját példáját elemezze ki.
Manuális vezetéskor a fékezés folyamata: észlelés-döntés-cselekvés-Fékkésedelmi idő. A reakció idő 1.sec. Az automatikus rendszereknél minden gyorsabban történik, de a Fékkésedelmi idő az marad! Ez a pillanatnyi idő elegendő, hogy beinduljon a haladási irány változás, ami kiváltja a baleseteket! Higgyenek a tudománynak, higgyenek nekem.
A közlekedés váltakozó sebességgel, változó és váltakozó iránnyal valósulhat meg. Ez önmagában is nagy feladat, mert a helyes sebességet és irányt kell megválasztani. Ezen felül a többi közlekedő reagálását is kezelni kell. Zavart okozhat az utakon egy időben közlekedő intelligens járművek és a manuálisan közlekedők viszonya, valamint a megkülönböztető jelzéssel közlekedő járművek!

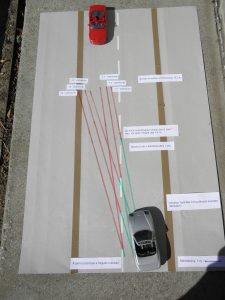
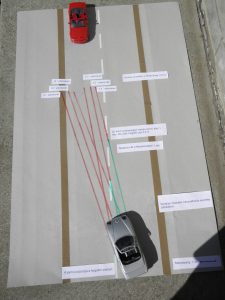
Ez a kép ad magyarázatot az elméletemre. Ne csak ilyen durva úthibára gondoljanak, hanem olyanra is amikor a dupla hátsókerék közül az egyik,kismértékben ugyan, de még levegőben van! A fizikai hatás ugyan az, vagyis eltérő súrlódási felület még fennáll. A mozgástér látható, nem biztosítja a váratlan haladási irányváltozáshoz a szabad mozgásteret! Fák, oszlopok, árok van közvetlenül az út mellett! Jobboldali sávban haladva 50.km/h sebességgel haladva a reakció 14.m, 90.km/h sebességnél a reakció út 25.m. Tehát minden lehetséges!



Balesetveszélyes nyomvályú

Az önvezető járműveknek itt jön el az igazság pillanata!
Az út biztonsági szempontból való megítélése, a jármű mozgását véve figyelembe, akkor mondható biztonságosnak, ha az úttengellyel megegyezően, egyenesvonalú mozgással halad, a menetiránynak megfelelően! Mozgásirány változásoknál a közlekedés veszélyeket idézhet elő, különösen ha váratlan veszélyhelyzet miatt kell változtatni, a mozgás irányán!
Az első, a vészhelyzetben való fékezésnél a fékkésedelmi idő lehetetlen kiküszöbölése. A különböző útfelületi hibák figyelembe vétele, és a sebesség megválasztása. A hosszanti úthibák végig balesetveszélyt jelentenek, milyen sebességértéket választanak? Mit vesznek figyelembe? A mozgásokra vonatkozó fizikai törvényeket, vagy a Közút Kezelő által meghatározott, enyhe, közepes, vagy súlyos értékeket? Én már erről kifejtettem a véleményemet, ezért számomra egyértelmű, hogy a fizikai törvényeket!
A közlekedésnek értelme, célja van, ezért a kitűzött úti cél elérése meghatározott időre, a sebességhatárok betartásával, nem teljesülhet! Az induljunk el időben tanáccsal sem lehet mit kezdeni! Milyen akadályozó tényezőket vegyünk figyelembe, és milyen időtartamokkal? Nincs rá megoldó képlet! Ez az utazást értelmetlenné, feleslegessé teszi, és kudarcra ítéli! Az úthibás útszakaszok gyakoriak és váltakozó fajtájúak. Az lenne erre a válasz, hogy akkor át lehet térni a manuális vezetésre! Ekkor a sebességet a vezető határozhatja meg, de az sokkal veszélyesebb. Ha kritikus helyzetekben a vezetőnek kell helytállnia, akkor mi a lényege az intelligens járműnek? A helyzetet bonyolítja, ha útfelület nedves, havas, vagy jeges! Tehát, miként választja meg az útviszony szerinti vezetéshez a sebességet? Probléma még, hogy melyik közlekedési módot vészi figyelembe ilyenkor, a gördülőt, vagy a csúszót? Az úthibás úton a váratlanul, és akaratunkon kívül megváltozhat a haladási irány! Gördülő üzemmódban még alacsony sebesség esetén is veszélybe kerülhetünk, ha váratlan
veszélyhelyzet miatti fékezéssel, csúszó üzemmódra váltunk. (lásd: fékezési táblázat)
Miként lehetséges a balesetveszélyes helyzeteket kivédeni?
- Gyorsítással (útfelületi hibás útszakaszon, váratlan haladási irányváltozás következhet be!)
- Fékezéssel (útfelületi hibás útszakaszon, váratlan haladási irányváltozás következhet be!)
- Oldalra kormányzással
- Fékezéssel, és oldalra kormányzással ( ebben a helyzetben is bekövetkezhet váratlan haladási irányváltozás!)
OLYMPUS DIGITAL CAMERA
OLYMPUS DIGITAL CAMERA
felezővonal közelében történt haladási irányváltozás az út jobb szélén bekövetkezett bekövetkezett haladási irányváltozás
Az intelligens járművek közlekedésénél megoldhatatlan feladatnak ítélem:
- úthibás utakon a sebességválasztást, ennek következtében az időben érkezést
- váratlan veszélyhelyzetek kiküszöbölését
- fékezéskor a fékkésedelmi idő hatását, a haladási irány megváltozását
A baleseti statisztikában, a feltüntetett okok között fel van tüntetve:
- gyorshajtás
- előzés
- kanyarodás
- követési távolság
Az előzés- kanyarodás-követési távolság feltételeinek meghatározása, a becslési képességünkön alapul. Ez a képességünk még a legnagyobb igyekezetünk ellenére sem felel meg, a mozgásokra vonatkozó fizikai törvényeknek! A mögöttünk, az előttünk haladók helyzetének megítélése, a sebességük mértéke, a forgalmi viszonyok, lehetővé teszik-e a manővert? Nagy kihívások ezek manuális vezetéskor, és az lesz a önjáró járműveknek is. Sok adat még ismeretlen az önjáró járműveknél. Lényeges az, milyen gyorsulásra és milyen végsebességre képesek, és engedélyezve? A fékezési táblázatban meghatározott követési, fékezési távolságok, és a fékút nem változik a manuális vezetésnél előírtakhoz képest. A fizikai törvények mozgásokra vonatkoznak, nincs különbség manuális, és önvezető mozgás között! Ha önvezető üzemmódban menetidő veszteséget szenvedünk el, át fogunk térni a manuális vezetésre. A veszélyhelyzetek nem változnak, azt manuális üzemmódban kell megoldani!
Önvezető járművel, valós körülmények között tegyenek kísérletet arra, hogy az indulás helyszínétől az érkezés helyszínéig a számított menetidőtől, mennyivel tér el a valós menetidő? Teljesül-e az időben érkezés? A sebességhatárok betartásáról nem beszélek, mert azt az önvezető járművek teljesíteni fogják. Lényeges szempont, ezért kíváncsian várom ezeket a híreket.
Kucsera Zoltán amatőr kutató